1 Ū░čį
ŲųžÖC(j©®)╩Ūį┌Å═(f©┤)ļsŪķørŽ┬Ą─ę╗ĘN┤¾ą═▀\(y©┤n)▌öÖC(j©®)ąĄŻ¼Ųõ▒Š╔ĒĄ─ĮY(ji©”)śŗ(g©░u)╠žąį║═äė(d©░ng)æB(t©żi)╠žąįČ╝ī”(du©¼)╩╣ė├ąį─▄ėą║▄┤¾Ą─ė░ĒæĪŻķLŲ┌ęįüĒŻ¼ŲųžÖC(j©®)Ą─įO(sh©©)ėŗ(j©¼)═∙═∙ę└┐┐╚╦╣żįO(sh©©)ėŗ(j©¼)║═é„Įy(t©»ng)Įø(j©®ng)“×(y©żn)Ą╚įO(sh©©)ėŗ(j©¼)ĘĮĘ©ĪŻ▀@ĘNįO(sh©©)ėŗ(j©¼)ĘĮĘ©Š▀ėą║▄┤¾Ą─ŠųŽ▐ąįĪŻ╚╦éā═∙═∙ų╗╩Ū┐╝æ]┴╦ŲųžÖC(j©®)ņoæB(t©żi)Ģr(sh©¬)Ą─╣żū„▌d║╔Ż¼Č°äė(d©░ng)æB(t©żi)╣żū„▌d║╔│Ż│ŻīóŲõ▐D(zhu©Żn)╗»×ķņoæB(t©żi)╣żū„▌d║╔üĒ┐╝æ]ĪŻ▀@ĘNįO(sh©©)ėŗ(j©¼)ĘĮĘ©▓╗─▄│õĘųĄžĘ┤æ¬(y©®ng)ŲųžÖC(j©®)Ą─╣żū„╩▄┴”ŪķørŻ¼ļyęį╚½├µ├Ķ╩÷ŲųžÖC(j©®)Ą─š¹ÖC(j©®)╣żū„ąį─▄ĪŻ
×ķ┤╦Ż¼▒Š╬─īóęįļŖäė(d©░ng)║∙╠JķT╩ĮŲųžÖC(j©®)ĮY(ji©”)śŗ(g©░u)×ķ└²Ż¼╗∙ė┌ANSYS▄ø╝■Į©┴óŲųžÖC(j©®)Ą─š¹ÖC(j©®)─Żą═Ż¼ī”(du©¼)ŲųžÖC(j©®)▀M(j©¼n)ąąĮY(ji©”)śŗ(g©░u)Ęų╬÷║═ā×(y©Łu)╗»įO(sh©©)ėŗ(j©¼)Ż¼Å─Č°╚½├µĄ─Ę┤æ¬(y©®ng)ŲųžÖC(j©®)Ą─š¹ÖC(j©®)ąį─▄ĪŻ═¼Ģr(sh©¬)Ż¼╩╣ė├APDLšZčįŲųžÖC(j©®)▀M(j©¼n)ąąģóöĄ(sh©┤)╗»Į©─ŻŻ¼╝ė▌dŻ¼ĮY(ji©”)śŗ(g©░u)Ęų╬÷║═ā×(y©Łu)╗»įO(sh©©)ėŗ(j©¼)ĪŻ═©▀^▀@╠ū│╠ą“Ż¼īó┤¾┤¾Ą─┐sČ╠═¼ŅÉą═▓╗═¼│▀┤ńĄ─ŲųžÖC(j©®)Ą─ķ_░l(f©Ī)ų▄Ų┌Ż¼×ķŲųžÖC(j©®)Ą─ĮY(ji©”)śŗ(g©░u)įO(sh©©)ėŗ(j©¼)Ęų╬÷╠ß╣®┴╦ę╗ĘNą┬Ą─įO(sh©©)ėŗ(j©¼)ĘĮĘ©ĪŻ
2 ─Żą═Į©┴ó┼c╝ė▌dĘų╬÷
2.1─Żą═ĮY(ji©”)śŗ(g©░u)┼c╗∙▒ŠģóöĄ(sh©┤)
2.1.1─Żą═ĮY(ji©”)śŗ(g©░u)
▒Š┤╬ŲųžÖC(j©®)─Żą═▓╔ė├Ą─╩Ū─│ŲųžÖC(j©®)ėąŽ▐ž¤(z©”)╚╬╣½╦ŠĄ─MHą═ļŖäė(d©░ng)║∙╠JķT╩ĮŲųžÖC(j©®)ĪŻš¹éĆ(g©©)ŲųžÖC(j©®)▓┐Ęų░³└©ų„┴║Ż¼ų¦╝▄║═Ąž┴║╚²┤¾▓┐ĘųĮM│╔ĪŻŲõųąŻ¼ŲųžÖC(j©®)Ą─ų„┴║▓┐Ęų▓╔ė├Ą─╩ŪŽõą═ų„┴║ĮY(ji©”)śŗ(g©░u)Ż¼ŲųžÖC(j©®)ų¦╝▄▓┐ĘųėųĘų×ķū¾Ż¼ėęā╔▓┐Ęųų¦╝▄Ż¼ū¾ų¦╝▄×ķĘų▓µĮY(ji©”)śŗ(g©░u)Ż¼ū¾ų¦╝▄ę¬│ą╩▄ŲųžÖC(j©®)▓┘ū„╩ęĄ─ųž┴┐ĪŻŲõųžę¬ĮY(ji©”)śŗ(g©░u)łD╚ńŽ┬łD╦∙╩ŠŻ║
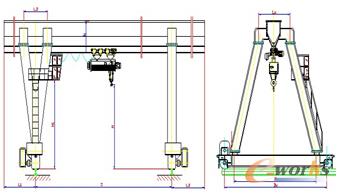
łD1 ŲųžÖC(j©®)ų„ę¬ĮY(ji©”)śŗ(g©░u)
2.1.2╗∙▒ŠģóöĄ(sh©┤)
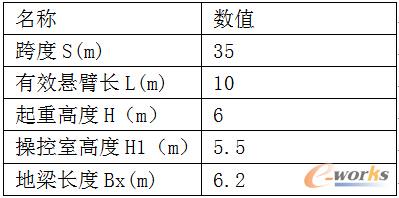
▒Š┤╬ŲųžÖC(j©®)Ą─ų„ę¬▓─┴ŽøQČ©▓╔ė├Q345õōŻ¼═©▀^ģóķåŽÓĻP(gu©Īn)╬─½I(xi©żn)Ą├ĄĮQ345▓─┴Žų„ę¬ģóöĄ(sh©┤)×ķÅŚąį─Ż┴┐Ex=206GMPŻ¼ ▓┤╦╔▒╚Vxy=0.3Ż¼├▄Č╚DENS=7.85g/cm3ĪŻŲųžÖC(j©®)Ųųžų„ę¬Ņ~Č©ųž┴┐Q=12tŻ¼ļŖäė(d©░ng)║∙╠Jųž┴┐200kgĪŻŲųžÖC(j©®)│▀┤ńų„ę¬ģóöĄ(sh©┤)╚ńŽ┬▒Ē╦∙╩ŠŻ║
▒Ē1 ŲųžÖC(j©®)ų„ę¬│▀┤ń
2.1.3ėąŽ▐į¬─Żą═
×ķ┴╦─▄ē“š²┤_ĄžĘ┤æ¬(y©®ng)ŲųžÖC(j©®)Ą─╣żū„ąį─▄Ż¼▒Š┤╬Į©─ŻøQČ©▓╔ė├shell63║═soild45ā╔ĘNå╬į¬Ż¼shell63╩Ūę╗ĘNŲĮ├µå╬į¬Ż¼įōå╬į¬├┐éĆ(g©©)╣Ø(ji©”)³c(di©Żn)Š▀ėą6éĆ(g©©)ūįė╔Č╚Ż¼╝╚ėąÅØŪ·─▄┴”Ż¼ėųėą─ż┴”Ż¼┐╔ęį│ą╩▄ŲĮ├µ▌d║╔║═Ę©Ž“▌d║╔ĪŻSoild45╩Ūę╗ĘNīŹ(sh©¬)¾wå╬į¬Ż¼├┐éĆ(g©©)å╬į¬ėą8éĆ(g©©)╣Ø(ji©”)³c(di©Żn)ĮM│╔Ż¼├┐éĆ(g©©)╣Ø(ji©”)³c(di©Żn)ėąxyz╚²éĆ(g©©)ĘĮŽ“ūįė╔Č╚Ż¼─▄ē“│ą╩▄╦▄ąįŻ¼┤¾ūāą╬║═┤¾æ¬(y©®ng)ūāĄ─╠žš„ĪŻŲųžÖC(j©®)Ą─ų„┴║║═ų¦╝▄▓┐Ęų▓╔ė├Ą─╩Ūshell63å╬į¬Ż¼ŲųžÖC(j©®)Ąž┴║øQČ©▓╔ė├soild45å╬į¬ĪŻī”(du©¼)ėąŽ▐į¬─Żą═▀M(j©¼n)ąąŠW(w©Żng)Ė±äØĘųŻ¼ę╗éĆ(g©©)äØĘų×ķ16562éĆ(g©©)å╬į¬║═16635éĆ(g©©)╣Ø(ji©”)³c(di©Żn)ĪŻśŗ(g©░u)Į©Ą─ŲųžÖC(j©®)ėąŽ▐į¬─Żą═╚ńŽ┬łD╦∙╩ŠŻ╗
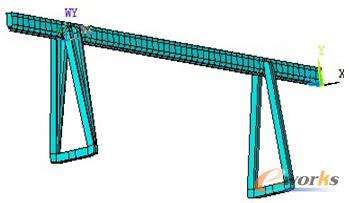
łD2 ŲųžÖC(j©®)ėąŽ▐į¬─Żą═
2.2ŲųžÖC(j©®)▌d║╔Ęų╬÷
ŲųžÖC(j©®)Ą─╣żū„Łh(hu©ón)Š│Å═(f©┤)ļsŻ¼╩▄ĄĮĄ─▌d║╔ĘNŅÉ▌^ČÓŻ¼Ūęūā╗»║▄┤¾ĪŻ╣╩į┌ī”(du©¼)Ųųž▀M(j©¼n)ąą▌d║╔Ęų╬÷Ģr(sh©¬)ų╗ī”(du©¼)ŲųžÖC(j©®)╩▄ĄĮĄ─ÄūĘN▒╚▌^Ąõą═Ą─▌d║╔▀M(j©¼n)ąąĘų╬÷ĪŻ═©▀^Ęų╬÷Ż¼▒Š╬─ų„ę¬┐╝æ]ęįŽ┬ÄūĘN╗∙▒Š▌d║╔Ż©ūįųž▌d║╔ĪóŲųž▌d║╔Ż¼╦«ŲĮ▀\(y©┤n)äė(d©░ng)æTąį┴”Ż®║═ĖĮ╝ė▌d║╔Ż©’L(f©źng)▌d║╔Ż®Ą╚ĪŻ
2.2.1ūįųž▌d║╔
ŲųžÖC(j©®)Ą─ūįųž▌d║╔ų„ę¬░³└©ŲųžÖC(j©®)ų„┴║ūįųžĪóļŖäė(d©░ng)║∙╠JūįųžĪóų¦╝▄ūįųžĪóĄž┴║ūįųžĪó▓┘ū„╩ęūįųžęį╝░ŲųžÖC(j©®)╔ŽŲõ╦¹įO(sh©©)éõĄ─ūįųžĪŻ┐╝æ]ĄĮŲųžÖC(j©®)╣żū„Ģr(sh©¬)╩▄ĄĮĄ─ø_ō¶Ż¼į┌ėŗ(j©¼)╦Ńūįųž▌d║╔Ģr(sh©¬)ę¬īóūįųž▌d║╔│╦ęįę╗Č©Ą─ø_ō¶ŽĄöĄ(sh©┤)ĪŻ
2.2.2Ų╔²▌d║╔
Ų╔²▌d║╔ų„ę¬╩ŪųĖŲ╔²┘|(zh©¼)┴┐Ą─ųž┴”Ż¼Ųõ░³└©Ųųž┴┐Ż¼Ą§Š▀║═õōĮz└KĄ╚Ą─ųž┴┐ĪŻį┌ėŗ(j©¼)╦ŃŲõųą▌d║╔Ģr(sh©¬)Ż¼ę¬┐╝æ]ė╔ė┌Ų╔²║═ųŲäė(d©░ng)Ą╚ī”(du©¼)ŲųžÖC(j©®)╣żū„ąį─▄Ą─ė░ĒæŻ¼╦∙ęįę▓ę¬īóŲ╔²▌d║╔│╦ęįę╗Č©Ą─äė(d©░ng)▌d║╔ŽĄöĄ(sh©┤)ĪŻ
2.2.3╦«ŲĮ▀\(y©┤n)äė(d©░ng)æTąį┴”
ŲųžÖC(j©®)į┌╦«ŲĮĘĮŽ“▀\(y©┤n)äė(d©░ng)Ģr(sh©¬)Ż¼┐╝æ]ĄĮ╦«ŲĮĘĮŽ“Ą─╝ė╦┘Ż¼ųŲäė(d©░ng)Ą╚ī”(du©¼)ŲųžÖC(j©®)╣żū„ąį─▄įņ│╔Ą─ė░ĒæŻ¼╦∙ęįŻ¼▀ĆąĶę¬┐╝æ]╦«ŲĮ▀\(y©┤n)äė(d©░ng)æTąį┴”Ż║
╣½╩Į1 ╦«ŲĮ▀\(y©┤n)äė(d©░ng)æTąį┴”ėŗ(j©¼)╦Ń╣½╩Į
╩ĮųąŻ╗α×ķåóäė(d©░ng)ĪóųŲäė(d©░ng)╝ė╦┘Č╚Ż¼ψ5×ķŽĄöĄ(sh©┤)Ż¼═©│Ż╚ĪųĄ1≤ψ5≤2Ż¼×ķ▒Š╬─╚ĪųĄ×ķ1.5ĪŻ
2.2.4ĖĮ╝ė▌d║╔
ķT╩ĮŲųžÖC(j©®)ų„ę¬╩Ū┬Č╠ņū„śI(y©©)Ż¼┐╝æ]ĄĮŲųžÖC(j©®)į┌┬Č╠ņŁh(hu©ón)Š│Ž┬┐╔─▄Ģ■(hu©¼)╩▄ĄĮ’L(f©źng)ū„ė├Ą╚Ż¼╦∙ęįŻ¼▒Š╬─▀Ćīó┐╝æ]ę╗Č©ū„ė├Ą─’L(f©źng)▌d║╔Ż¼▒Š╬─īóĘų▌d║╔Ęų×ķ╣żū„ĀŅæB(t©żi)Ęų▌d║╔║═ĘŪ╣żū„ĀŅæB(t©żi)’L(f©źng)▌d║╔ā╔ĘNĪŻ
2.2.5╝s╩°Śl╝■
┐╝æ]ŲųžÖC(j©®)▀\(y©┤n)ąąÖC(j©®)śŗ(g©░u)Ą─╝s╩°Śl╝■Ż¼ī”(du©¼)ŲųžÖC(j©®)Ąž┴║Ž┬Č╦▀M(j©¼n)ąąūįė╔Č╚╝s╩°Ż¼Ą├ĄĮ²łķTŲųžÖC(j©®)Ą─╩▄┴”─Żą═ĪŻ
3 ŲųžÖC(j©®)╩▄┴”ĮY(ji©”)╣¹Ęų╬÷
3.1ŲųžÖC(j©®)ņoæB(t©żi)╩▄┴”Ęų╬÷
ī”(du©¼)ŲųžÖC(j©®)▀M(j©¼n)ąąņoæB(t©żi)╩▄┴”ėŗ(j©¼)╦ŃŻ¼Ęų╬÷ĮY(ji©”)╣¹▀M(j©¼n)ąą║¾╠Ä└ĒŻ¼ĘųäeĄ├ĄĮŲųžÖC(j©®)╩▄┴”║¾Ą─ūŅ┤¾ūāą╬║═ūŅ┤¾æ¬(y©®ng)┴”╚ńŽ┬łD╦∙╩ŠŻ║
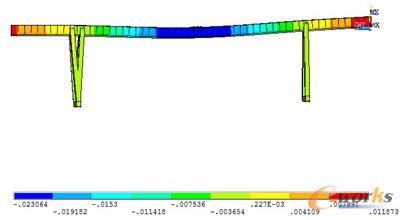
łD3 ūŅ┤¾ūāą╬įŲłD
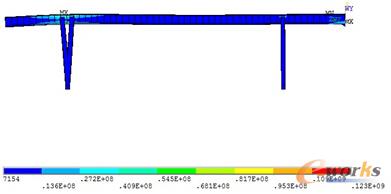
łD4 ūŅ┤¾æ¬(y©®ng)┴”įŲłD
═©▀^Ęų╬÷┐╔ų¬Ż¼ūŅ┤¾ūāą╬│÷¼F(xi©żn)į┌ŲųžÖC(j©®)Ą─ųąķg╬╗ų├Ż¼ūŅ┤¾ūāą╬ųĄ×ķ0.023m,ūŅ┤¾æ¬(y©®ng)┴”ųĄ│÷¼F(xi©żn)į┌Ęų▓µų¦╝▄ėąą¦æę▒█┴║╠ÄŻ¼ūŅ┤¾æ¬(y©®ng)┴”ųĄ×ķ123MPaĪŻŲõūŅ┤¾ūāą╬║═ūŅ┤¾ūāą╬æ¬(y©®ng)┴”Š∙ąĪė┌įSė├ōŽČ╚║═įSė├æ¬(y©®ng)┴”Ż¼Ūęėąę╗Č©Ą─Ė╗ėÓŻ¼╦∙ęįėą║▄┤¾Ą─ā×(y©Łu)╗»įO(sh©©)ėŗ(j©¼)┐šķgĪŻ
3.2ŲųžÖC(j©®)äė(d©░ng)æB(t©żi)Ęų╬÷
3.2.1─ŻæB(t©żi)Ęų╬÷
═©▀^ī”(du©¼)ŲųžÖC(j©®)─ŻæB(t©żi)Ęų╬÷Ż¼¼F(xi©żn)Ą├ĄĮŲųžÖC(j©®)Ą─Ū░6ļAš±äė(d©░ng)Ņl┬╩╚ńŽ┬▒Ē╦∙╩ŠŻ╗
▒Ē2 ŲųžÖC(j©®)š±äė(d©░ng)Ņl┬╩

Ą┌ę╗ļAŅl┬╩ų„ę¬Ę┤ė│ŲųžÖC(j©®)į┌ÖMŽ“ĘĮŽ“Ą─š±äė(d©░ng)Ż¼┤╦š±äė(d©░ng)┐╔─▄ėąŲųžÖC(j©®)Ą─åóäė(d©░ng)Ż¼ųŲäė(d©░ng)Ą╚ę²ŲŻ¼Ą┌Č■ļAŅl┬╩ų„ę¬Ę┤ė│ŲųžÖC(j©®)Ą─┐vŽ“ĘĮŽ“Ą─š±äė(d©░ng)Ż¼┤╦š±äė(d©░ng)┐╔─▄ė╔ļŖäė(d©░ng)║∙╠JĄ─åóäė(d©░ng)║═ųŲäė(d©░ng)Ģr(sh©¬)ę²ŲŻ¼Ą┌╚²ļAŻ¼Ą┌╦─ļAų„ę¬Ę┤ė│┴╦ÖMŽ“š±äė(d©░ng)Ą─╣╠ėąŅl┬╩Ż¼Ą┌╬ÕļAĘ┤ė│┴╦ŲųžÖC(j©®)Ą─╔ŽŽ┬š±äė(d©░ng)Ą─╣╠ėąŅl┬╩Ż¼Ą┌┴∙ļAŅl┬╩Ę┤ė│┴╦ŲųžÖC(j©®)Ą─ÖMŽ“š±äė(d©░ng)Ą─╣╠ėąŅl┬╩ĪŻ
3.2.2┘╔Ēææ¬(y©®ng)Ęų╬÷
┘╔Ēææ¬(y©®ng)Ęų╬÷ų„ę¬ė├ė┌┤_Č©ŲųžÖC(j©®)ĮY(ji©”)śŗ(g©░u)į┌│ą╩▄ļSĢr(sh©¬)ķg░┤š²ŽęęÄ(gu©®)┬╔ūā╗»Ą─▌d║╔Ģr(sh©¬)Ą─ĘĆ(w©¦n)æB(t©żi)Ēææ¬(y©®ng)ĪŻ┘╔ŽÓæ¬(y©®ng)Ęų╬÷┐╔ėŗ(j©¼)╦Ń│÷ĮY(ji©”)śŗ(g©░u)į┌ÄūĘNŅl┬╩ū„ė├Ž┬Ą─Ēææ¬(y©®ng)ųĄī”(du©¼)Ņl┬╩Ą─Ū·ŠĆŻ¼Å─Č°Ż¼ŅA(y©┤)£y(c©©)ĮY(ji©”)śŗ(g©░u)Ą─│ų└m(x©┤)äė(d©░ng)┴”Ą─╠žąįŻ¼“×(y©żn)ūC╩Ūʱ─▄┐╦Ę■╣▓š±Ż¼ŲŻä┌Ą╚ė╔š±äė(d©░ng)ę²ŲĄ─ėą║”ĮY(ji©”)╣¹ĪŻ┘╔ŽÓæ¬(y©®ng)Ą─Ęų╬÷ĮY(ji©”)╣¹╚ńŽ┬łDŻ║
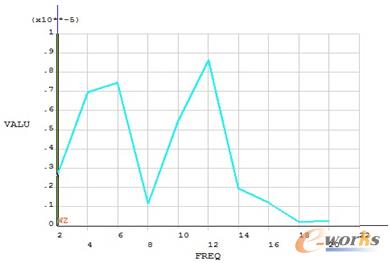
łD5 ┘╔Ēææ¬(y©®ng)Ęų╬÷łD
═©▀^─ŻæB(t©żi)Ęų╬÷║═ųCĒææ¬(y©®ng)Ęų╬÷łDŻ¼┐╔ęįĄ├│÷ŲųžÖC(j©®)Ą─╔ŽŽ┬╣▓š±Ņl┬╩ų„ę¬│÷¼F(xi©żn)į┌4~6Hz║═12Hzū¾ėęŻ¼ė╔ė┌Ė▀ļAŅl┬╩ī”(du©¼)ŲųžÖC(j©®)Ą─ė░Ēæ▌^ąĪŻ¼╣╩▀@└’ų╗┐╝æ]Ą═ļAŅl┬╩ĪŻė╔─ŻæB(t©żi)Ęų╬÷Ą├ų¬Ą┌╬ÕļAŅl┬╩ų„ę¬╩Ū╔ŽŽ┬šäė(d©░ng)Ą─╣╠ėąŅl┬╩Ż¼ę▓╠Äė┌4~6Hzų«ķgŻ¼╣╩īóĄ┌╬ÕļAŅl┬╩ū„×ķ▒Š┤╬ā×(y©Łu)╗»įO(sh©©)ėŗ(j©¼)Ą──┐ś╦(bi©Īo)ų«ę╗ĪŻ
4 ŲųžÖC(j©®)ā×(y©Łu)╗»įO(sh©©)ėŗ(j©¼)
4.1įO(sh©©)ėŗ(j©¼)ūā┴┐
įO(sh©©)ėŗ(j©¼)ūā┴┐Ą─┤_Č©īŹ(sh©¬)┘|(zh©¼)╔Ž╩ŪĮY(ji©”)śŗ(g©░u)ģóöĄ(sh©┤)╗»Ą─▀^│╠Ż¼▒Š┤╬ā×(y©Łu)╗»įO(sh©©)ėŗ(j©¼)Ą─ų„ę¬ģóöĄ(sh©┤)╚ńŽ┬▒Ē╦∙╩ŠŻ║
▒Ē3 ā×(y©Łu)╗»įO(sh©©)ėŗ(j©¼)ūā┴┐

4.2╝s╩°Śl╝■
╝s╩°Śl╝■╝┤ĀŅæB(t©żi)ūā┴┐Ż¼▒Š┤╬Ą─╝s╩°Śl╝■ų„ę¬░³└©ņoÅŖ(qi©óng)Č╚╝s╩°Śl╝■ĪóņoäéČ╚╝s╩°Śl╝■Īóäė(d©░ng)╬╗ęŲ╝s╩°Śl╝■Īóäė(d©░ng)äéČ╚╝s╩°Śl╝■║═╝s╩°Śl╝■╔ŽŽ┬╩ĮĪŻ
4.2.1ņoÅŖ(qi©óng)Č╚╝s╩°Śl╝■
ņoÅŖ(qi©óng)Č╚╝s╩°Śl╝■╩ŪųĖņoÅŖ(qi©óng)Č╚Ą─įO(sh©©)ėŗ(j©¼)£╩(zh©│n)ät×ķĮY(ji©”)śŗ(g©░u)ųą«a(ch©Żn)╔·Ą─ūŅ┤¾æ¬(y©®ng)┴”▓╗┤¾ė┌ĮY(ji©”)śŗ(g©░u)▓─┴ŽĄ─įSė├æ¬(y©®ng)┴”[σ] Ż¼╣╩╠ß╚ĪļŖäė(d©░ng)║∙╠J╬╗ė┌ųąķg╬╗ų├╠ÄĄ─ūŅ┤¾æ¬(y©®ng)┴”σLmax║═ū¾ėęæę▒█┴║╠ÄĄ─ūŅ┤¾æ¬(y©®ng)┴”σlmaxŻ¼ĘųäeĮoėĶ╝s╩°ĪŻ
╣½╩Į2 ņoÅŖ(qi©óng)Č╚╝s╩°Śl╝■
4.2.2ņoäéČ╚╝s╩°Śl╝■
Ė∙ō■(j©┤)ĪČŲųžÖC(j©®)įO(sh©©)ėŗ(j©¼)ęÄ(gu©®)ĘČĪĘųąĄ─ęÄ(gu©®)Č©Ż¼╠ß╚ĪŲųžÖC(j©®)ųąĄ─ĀŅæB(t©żi)ūā┴┐ĮoėĶęįŽ┬╝s╩°Ż¼╝s╩°║»öĄ(sh©┤)×ķŻ║

╣½╩Į3 ņoäéČ╚╝s╩°Śl╝■
╩ĮųąŻ╗yL×ķ┐ńųą┤╣ų▒ņoōŽČ╚Ż╗yl×ķėąą¦æę▒█Č╦┤╣ų▒ņoōŽČ╚Ż╗uL×ķ┐ńųą╣Ø(ji©”)³c(di©Żn)╦«ŲĮ╬╗ęŲŻ╗ul×ķėąą¦æę▒█│÷╣Ø(ji©”)³c(di©Żn)╦«ŲĮ╬╗ęŲĪŻ
4.2.3äė(d©░ng)╬╗ęŲ╝s╩°Śl╝■
Ž▐ųŲ²łķTŲųžÖC(j©®)äė(d©░ng)╬╗ęŲĄ─ūŅ┤¾ųĄ┼cŲųžÖC(j©®)ņo╬╗ęŲĄ─ūŅ┤¾ųĄŽÓ═¼Ż¼╣╩æ¬(y©®ng)╠ß╚Ī╦▓æB(t©żi)äė(d©░ng)┴”īW(xu©”)Ęų╬÷ųą┐ńųą╣Ø(ji©”)³c(di©Żn)Ą─ūŅ┤¾╬╗ęŲδd▀M(j©¼n)ąą╝s╩°Ż║
╣½╩Į4 äė(d©░ng)╬╗ęŲ╝s╩°Śl╝■
4.2.4äė(d©░ng)äéČ╚╝s╩°Śl╝■
Ė∙ō■(j©┤)ĪČŲųžÖC(j©®)įO(sh©©)ėŗ(j©¼)╩ųāį(c©©)ĪĘŻ¼ļŖäė(d©░ng)║∙╠JķT╬╗ė┌ŲųžÖC(j©®)┐ńųą╬╗ų├Ģr(sh©¬)Ż¼ŲųžÖC(j©®)Ą─╔ŽŽ┬ūįšŅl┬╩f5ūŅ║├æ¬(y©®ng)įō╠Äė┌2~4Hzų«ķgŻ║

╣½╩Į5 äė(d©░ng)äéČ╚╝s╩°Śl╝■
4.2.5╝s╩°Śl╝■╔ŽŽ┬╩Į
įO(sh©©)Č©įO(sh©©)ėŗ(j©¼)ūā┴┐║·╔ŽŽ┬╩Į╝s╩°×ķŻ║

╣½╩Į6 ╝s╩°Śl╝■╔ŽŽ┬╩Į
4.3─┐ś╦(bi©Īo)║»öĄ(sh©┤)
▒Š┤╬Ą─ā×(y©Łu)╗»─┐ś╦(bi©Īo)║»öĄ(sh©┤)øQČ©Ęųäe▓╔ė├ŲųžÖC(j©®)Ą─š¹¾w┘|(zh©¼)┴┐ūŅąĪ×ķ─┐ś╦(bi©Īo)║═ļŖäė(d©░ng)║∙╠J╬╗ė┌┐ńųą╬╗ų├Ģr(sh©¬)Ą─ŲųžÖC(j©®)╔ŽŽ┬ūįšŅl┬╩ūŅĄ═×ķ─┐ś╦(bi©Īo)ĪŻę“╦∙ė├ėąŽ▐į¬│╠ą“ANSYSĄ─ā×(y©Łu)╗»─ŻēKų╗─▄Ū¾ĮŌ─┐ś╦(bi©Īo)║»öĄ(sh©┤)ūŅąĪ╗»Ą─å¢Ņ}Ż¼╣╩╠ß╚Ī─┐ś╦(bi©Īo)║»öĄ(sh©┤)×ķĄ┌╬ÕļAŲĮ┬╩Ą─Ą╣öĄ(sh©┤)F2ĪŻ╦∙ęį─┐ś╦(bi©Īo)║»öĄ(sh©┤)Ęųäe×ķŻ║
╣½╩Į7 ─┐ś╦(bi©Īo)║»öĄ(sh©┤)
4.4ā×(y©Łu)╗»ĮY(ji©”)╣¹
Ė∙ō■(j©┤)╔Ž╩÷─Żą═Ż¼└¹ė├ANSYSėąŽ▐į¬▄ø╝■Ą─ā×(y©Łu)╗»─ŻēK▀M(j©¼n)ąąā×(y©Łu)╗»ĪŻā×(y©Łu)╗»║¾Ą─ĮY(ji©”)╣¹╩Ūę╗ĮMļx╔óĄ─öĄ(sh©┤)ō■(j©┤)ĪŻŲõā×(y©Łu)╗»Ū░║¾Ą─Ė„įO(sh©©)ėŗ(j©¼)ūā┴┐╚ń▒Ē4║═▒Ē5╦∙╩ŠŻ║
▒Ē4 ęį┘|(zh©¼)┴┐×ķ─┐ś╦(bi©Īo)║»öĄ(sh©┤)Ą─ā×(y©Łu)╗»ĮY(ji©”)╣¹

▒Ē5 ęįĄ┌5ļAŅl┬╩Ą─Ą╣öĄ(sh©┤)×ķ─┐ś╦(bi©Īo)║»öĄ(sh©┤)Ą─ā×(y©Łu)╗»ĮY(ji©”)╣¹

īóā×(y©Łu)╗»ęį║¾Ą─öĄ(sh©┤)ō■(j©┤)▀M(j©¼n)ąąį┘┤╬ėŗ(j©¼)╦ŃŻ¼ĮY(ji©”)╣¹▒Ē├„Ż¼ŲųžÖC(j©®)Ą─š¹¾w┘|(zh©¼)┴┐£p╔┘┴╦17.8%Ż¼Ą┌╬ÕļA╣╠ėąŅl┬╩×ķ3.88HzĪŻ
5 ĮY(ji©”)šZ
▒Š╬─═©▀^ėąŽ▐į¬▄ø╝■ā×(y©Łu)╗»ĘĮĘ©Ż¼ęįļŖäė(d©░ng)║∙╠JķT╩ĮŲųžÖC(j©®)×ķ蹊┐ī”(du©¼)Ž¾Ż¼ęįŲųžÖC(j©®)Ą─š¹ÖC(j©®)┘|(zh©¼)┴┐║═╣╠ėąŅl┬╩×ķā×(y©Łu)╗»─┐ś╦(bi©Īo)Ż¼ęįŲųžÖC(j©®)Ą─ÅŖ(qi©óng)Č╚Ż¼äéČ╚║═äė(d©░ng)╬╗ęŲĄ╚×ķ╝s╩°Śl╝■Ż¼Į©┴ó┴╦ŲųžÖC(j©®)Ą─ā×(y©Łu)╗»įO(sh©©)ėŗ(j©¼)─Żą═Ż¼ī”(du©¼)ŲųžÖC(j©®)▀M(j©¼n)ąą┴╦ā×(y©Łu)╗»įO(sh©©)ėŗ(j©¼)ĪŻĮY(ji©”)╣¹▒Ē├„Ż¼įōĘĮĘ©─▄ē“ėąą¦Ąž£p▌pŲųžÖC(j©®)Ą─┘|(zh©¼)┴┐║═Ė─ūāŲųžÖC(j©®)Ą──ŻæB(t©żi)╣╠ėąŅl┬╩ĪŻ×ķŲųžÖC(j©®)Ą─ā×(y©Łu)╗»įO(sh©©)ėŗ(j©¼)╠ß╣®┴╦ę╗éĆ(g©©)▒╚▌^║├Ą─ā×(y©Łu)╗»įO(sh©©)ėŗ(j©¼)ĘĮĘ©ĪŻ
║╦ą─ĻP(gu©Īn)ūóŻ║═ž▓ĮERPŽĄĮy(t©»ng)ŲĮ┼_(t©ói)╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śI(y©©)äš(w©┤)ŅI(l©½ng)ė“ĪóąąśI(y©©)æ¬(y©®ng)ė├Ż¼╠N(y©┤n)║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śI(y©©)äš(w©┤)╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬(y©®ng)µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśI(y©©)äš(w©┤)ŅI(l©½ng)ė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śI(y©©)ĻP(gu©Īn)ūóERP╣▄└ĒŽĄĮy(t©»ng)Ą─║╦ą─ŅI(l©½ng)ė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śI(y©©)ą┼Žó╗»Į©įO(sh©©)╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D(zhu©Żn)▌dšł(q©½ng)ūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠW(w©Żng)http://m.vmgcyvh.cn/
▒Š╬─ś╦(bi©Īo)Ņ}Ż║ļŖäė(d©░ng)║∙╠JķT╩ĮŲųžÖC(j©®)ĮY(ji©”)śŗ(g©░u)Ęų╬÷┼cā×(y©Łu)╗»įO(sh©©)ėŗ(j©¼)
▒Š╬─ŠW(w©Żng)ųĘŻ║http://m.vmgcyvh.cn/html/solutions/14019318673.html



▀xą═ųąą─")
¾w“×(y©żn)ųąą─")
«a(ch©Żn)ŲĘ┘Å┘I")
æ(zh©żn)┬į║Žū„")