1 Ū░čį
ī”ė┌ÖCąĄ╚╦Č°čįŻ¼╚ßąįįOėŗéĆäéąįįOėŗČ╝╩Ūį┌įOėŗ▀^│╠ųąĄ─ųž³cŻ¼ę“┤╦╩Ūš¹éĆÖCļŖę╗¾w╗»«aŲĘųą▓╗┐╔╚▒╔┘Ą─ę╗▓┐ĘųŻ¼═¼Ģrū„×ķÖCąĄīW┐Ų║═ļŖūėīW┐ŲĄ─Į╗▓µīW┐Ųį┌š¹éĆįOėŗ▀^│╠ųąėąų°Å═ļs╗»Ą─╠ž³cĪŻ
2 ÖCŲ„╚╦ÖCąĄŽĄĮyĄ─įOėŗ╠ž³c
ÖCŲ„╚╦ÖCąĄŽĄĮyę╗░Ń░³└©ÖC╔ĒĪóąąū▀ŽĄĮyĪó▓┘ū„▒█Īó─®Č╦ł╠ąąŲ„╝░ų▄▀ģįOéõŻ¼▀@╩ŪÖCŲ„╚╦Ą─ųžę¬ĮM│╔▓┐ĘųŻ¼╩ŪÖCŲ„╚╦ŽĄĮyį┌╣żū„ųąīŹ¼FÖCŲ„╚╦Ė„ĘN╣”─▄▀\äė║═▓┘ū„╚╬䚥─▒╗┐žī”Ž¾ĪŻ╦³┼cÖCŲ„╚╦┐žųŲŽĄĮyĪóĖąų¬ŽĄĮyĄ╚śŗ│╔ę╗éĆŠo├▄┬ōŽĄĄ─š¹¾wĪŻÖCŲ„╚╦ÖCąĄŽĄĮyĄ─ąį─▄ā×┴ėų▒Įėė░ĒæĄĮÖCŲ„╚╦ėŗ╦ŃÖC┐žųŲŽĄĮyĪó╦┼Ę■ŽĄĮyĪóĖąų¬ŽĄĮy╝░ŲõŽÓĻP▄øĪóė▓╝■Ą─Å═ļs│╠Č╚ĪŻ┴Ēę╗ĘĮČ°Ż¼Š═ŲõÖCąĄŽĄĮy▒Š╔ĒČ°čįŻ¼ė╔ė┌ÖCŲ„╚╦ę¬Ū¾Š▀ėąĖ▀Č╚Ą──▄äėąį║═ņ`╗ŅąįŻ¼─▄į┌Å═ļsŚl╝■Ž┬ØMūŃĖ„ĘNĖ„śėĄ─╣żū„ę¬Ū¾║═ū„śI╚╬䚯¼Č°▀@ą®╩Ūé„ĮyÖCąĄčbų├▓╗─▄▀_ĄĮĄ─ĪŻę“┤╦Ż¼ÖCŲ„╚╦Ą─ÖCąĄŽĄĮyįOėŗ║═é„ĮyĄ─ÖCąĄįOėŗėąų°▒Š┘|Ą─▓ŅäeĪŻŲõÖCąĄŽĄĮyĄ─įOėŗŠ▀ėą╚ńŽ┬╠ž³cŻ║
(1)Å═ļsąįÖCŲ„╚╦Ą─ÖCąĄĮYśŗ┐éĄ─üĒ┐┤╩ŪŽÓ«öė┌ę╗ŽĄ┴ąæę▒█ŚU╝■═©▀^ĻP╣Ø┤«▀BŲüĒĄ─ķ_╩Įµ£ĪŻĄ½ė╔ė┌š`▓Ņ║═ūāą╬Ą─└█ĘeŻ¼╩╣Ą├į┌ĮYśŗįOėŗĢrŻ¼ę╗ĘĮČ°ę¬▒ŻūCķ_µ£ĮYśŗĄ──▄äėąį║═ņ`╗ŅąįŻ¼┴Ēę╗ĘĮ├µėųę¬╠Ä└Ē▀@ĘNĮYśŗĦüĒĄ─▀\äėé„▀fĪóš`▓Ņčaāö║═Ž¹│²Ą╚å¢Ņ}Ż¼╩╣ÖCąĄĮYśŗĄ─įOėŗūāĄ├▌^×ķÅ═ļsĪŻ
(2)ę└┘ćąįė╔ė┌ÖCąĄŽĄĮy┼c┐žųŲŽĄĮyĪóĖąų¬ŽĄĮyĄ╚śŗ│╔ÖCŲ„╚╦Ą─ę╗éĆŠo├▄¾wŻ¼ę“┤╦ÖCąĄŽĄĮyĄ─┐é¾wĘĮ░ĖĪóĮYśŗĘĮ░Ėę└┘ćė┌┐žųŲŽĄĮyĪóĖąų¬ŽĄĮyĄ─ĘĮ╩ĮĪóĘĮĘ©╝░╩ųČ╬Ą─┤_┴óĪŻ
(3)ģfš{ąįÖCŲ„╚╦ÖCąĄŽĄĮyĄ─ą╬╩ĮĪóīŹ¼F╩ųČ╬Ą╚īóų▒Įėė░ĒæĄĮ┐žųŲŽĄĮyĄ─ĮYśŗ╝░Å═ļs│╠Č╚Ż¼ęį╝░Ųõ╦³ŽĄĮy▓┐╝■Ą─ĮYśŗĪó░▓čbĪóš{┐žĄ╚Ż¼ę“┤╦Ż¼ÖCąĄŽĄĮyĄ─įOėŗ▒žĒÜ┼cŲõ╦³ŽĄĮy▀Mąą▓╗öÓĄ─ģfš{▓┼─▄▀MąąĪŻ
3 │ŻęŖĄ─ÖCąĄ▓óąą─Ż╩Į
3.1 ÖCŲ„╚╦įOėŗĄ─ę╗░Ń─Ż╩Į
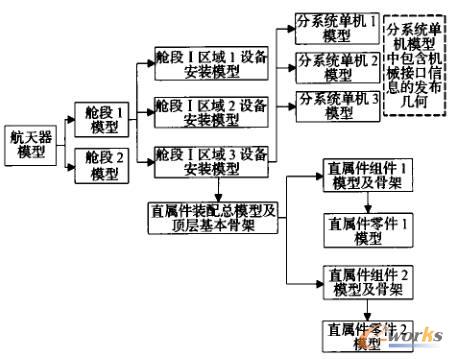
ÖCŲ„╚╦Ą─įOėŗų„ę¬Ęų×ķ3éĆ▀^│╠Ż║ę╗╩ŪĖ┼─ŅįOėŗŻ¼╝┤Ė∙ō■Č©┴xĄ─╚╬äšüĒ┤_Č©ÖCŲ„╚╦Ą─ł╠ąąę¬Ū¾Ż¼░³└©žō║╔Īó▓┘ū„ī”Ž¾ĪóŠ½Č╚Īó╦┘Č╚Ą╚Ż¼▓ó▀MąąÖCąĄŽĄĮyĘĮ░ĖįOėŗŻ╗Č■╩Ū│§▓ĮįOėŗŻ¼░³└©ÖCąĄĮYśŗįOėŗ┼cĘų╬÷Īóé„ĖąŲ„┼c┐žųŲ▓▀┬įĄ─┤_Č©Īó╦┼Ę■ŽĄĮyįOėŗ┼c─ŻēK╗»Ż╗╚²╩Ūįö╝ÜįOėŗŻ¼░³└©įö╝ÜÖCąĄįOėŗĪóįö╝ÜļŖūėįOėŗ║═ŽĄĮyŠC║ŽĪŻ
ī”├┐ę╗▀^│╠Ą─įuār╚¶▓╗═©▀^Ż¼ätČ╝īóĘĄ╗žĄĮįō▀^│╠Ą─│§╩╝³c╗“╔Žę╗▀^│╠ųą╚źį┘įOėŗĪŻ▀@ĘNūį╔ŽČ°Ž┬Ą─┤«ąąįOėŗĘĮ╩Į▓╗└¹ė┌ÖCŲ„╚╦ŽĄĮyĄ─š¹¾wā×╗»Ż¼═¼Ģrīó╩╣įOėŗ▀^│╠ūāĄ├┬■ķLĪŻ
3.2 ÖCąĄŽĄĮy▓óąąįOėŗĄ──Ż╩Į
╦∙ų^▓óąąįOėŗŠ═╩ŪųĖį┌«aŲĘķ_░lĄ─įOėŗļAČ╬╝┤┐╝æ]«aŲĘ╔·├³ų▄Ų┌ųą╣ż╦ćęÄäØĪóųŲįņĪóčb┼õĪó£yįćĪóŠSūoĄ╚Ųõ╦³Łh╣ØĄ─ė░ĒæŻ¼═©▀^Ė„Łh╣ØĄ─▓óąą╝»│╔Ż¼ęį┐sČ╠«aŲĘĄ─ķ_░lĢrķgŻ¼╠ßĖ▀«aŲĘĄ─įOėŗ┘|┴┐Ż¼ĮĄĄ═«aŲĘ│╔▒ŠĪŻ
ī”ė┌ÖCļŖę╗¾w╗»«aŲĘĄ─ÖCŲ„╚╦üĒšfŻ¼Ųõ▒Š╔ĒŠ═╩ŪÖCąĄĪó┐žųŲĪóļŖūė║═ėŗ╦ŃÖCĄ╚Ė▀╝╝ągĄ─╝»│╔Ż¼ę“┤╦Ż¼ÖCŲ„╚╦ÖCąĄŽĄĮyĄ─įOėŗąĶę¬ÖCąĄ▀\äė┼cé„äėĪó┐žųŲ└Ēšō┼cĘĮĘ©ĪóļŖūėļŖÜŌ║═ėŗ╦ŃÖCæ¬ė├╝╝ągĄ╚īW┐ŲŽÓ╗źĮ╗▓µ║═ØB═ĖĄ─╝╝ągų¦│ųĪŻßśī”ÖCŲ„╚╦ŽĄĮyĄ─įOėŗę¬Ū¾║═╠ž³cŻ¼▀\ė├▓óąąįOėŗĄ─╦╝ŽļĪŻ
3.3 ─Ż╩ĮĘų╬÷
ÖCŲ„╚╦ÖCąĄŽĄĮyĄ─▓óąąįOėŗ─Ż╩Įų„ę¬ė╔ĘĮ░ĖįOėŗĪóŅIė“╝╝ągĘų╬÷ĪóŠC║Ž┼cįuāręį╝░ÖCąĄŽĄĮyŠ▀¾wįOėŗĄ╚▓┐Ęųśŗ│╔ĪŻ▓╗ļy┐┤│÷Ż¼ĘĮ░ĖįOėŗ┼cŅIė“╝╝ągĘų╬÷ī”æ¬ė┌ę╗░ŃęŌ┴x╔ŽĄ─ÖCąĄįOėŗĄ─Ė┼─ŅįOėŗ▀^│╠Ż¼ŠC║Žįuār┼cŽĄĮyįOėŗī”æ¬ė┌Š▀¾wįOėŗ▀^│╠ĪŻė╔ė┌ÖCŲ„╚╦Ą─▀\äė║═é„äėĘĮ░ĖįOėŗ╔µ╝░ĄĮÖCŲ„╚╦Ą─ÖCśŗĪó▄ē█EęÄäØĪóš`▓ŅĄ─Öz£y▒µūR┼c▄øė▓╝■čaāö╝╝ągĪóäė┴”īWģóöĄ▒µūRĪóš±äė┼cĘ└ų╬ĪóĻP╣Ø╚ßąįĄ╚ĘĮČ°Ą─ā╚╚▌Ż¼ę“┤╦ąĶę¬ÖCśŗ▀\äėĪóé„äėŽĄĮyĪó┐žųŲŽĄĮyŻ©░³└©é„ĖąĪóÖz£yŻ®ĪóļŖūėŽĄĮy║═ųŲįņ╣ż╦ć╝░čb┼õĄ╚ĘĮ├µĄ─╝╝ągų¦ō╬Ż¼═¼ĢrŻ¼ÖCŲ„╚╦Ą─▀\äė┼cé„äėą╬╩Įę▓ę╗Č©│╠Č╚╔ŽøQČ©┴╦╔Ž╩÷ų¦ō╬╝╝ągŽĄĮyĄ─ĘĮ╩Į║═ĘĮĘ©ĪŻ╦∙ęįŻ¼▀\äėĘĮ░Ė║═é„äėčbų├ĘĮ░ĖĄ─įOėŗ┼cĖ„ų¦ō╬ŽĄĮyĄ─Ęų╬÷įOėŗ╩Ūę╗ĘN▓óąąįOėŗĄ─ģfū„ĻPŽĄĪŻ▀@śė▓┼─▄▀_ĄĮÖCąĄŽĄĮyĘĮ░Ė┼cŲõ╦³ŽĄĮyĘĮ░ĖĄ─ģfš{Īóėąą¦Īó┐╔┐┐┼c┐ņĮ▌įOėŗĄ─īŹ¼FĪŻŽĄĮyĄ─ŠC║Ž╩Ūī”ÖCŲ„╚╦ÖCąĄŽĄĮyĖ„ĮM│╔▓┐ĘųĄ─┐é¾wģfš{Ż¼═¼Ģrī”įOėŗĘĮ░Ė▀MąąįuārĪŻ╦³┴”Ū¾▒▄├ŌĘĮ░ĖųąĖ„ų¦ō╬╝╝ągĘĮ░ĖĄ─ø_═╗Ż¼ę²ī¦▓ó╠Ä└ĒĖ„ų¦ō╬╝╝ągĘĮ░ĖĄ─═Ļ╔ŲĮyę╗Ż¼▓óī”ÖCąĄŽĄĮyįOėŗĘĮ░ĖĮM┐ŚŠ▀¾wīŹ╩®ĪŻ
4 ā╔▌åęŲäė╩ĮĄ╣┴óö[ÖCŲ„╚╦Ą─▀\äė─Żą═
Č■╝ēĄ╣┴óö[ŽĄĮy╩Ūę╗éĆ┐ņ╦┘Ēæ欎ĄĮyŻ¼ę¬Ū¾ł╠ąąŲ„─▄Ė∙ō■┐žųŲ┴┐ūā╗»┐ņ╦┘ū÷│÷äėū„ŽĄĮyų„ę¬ė╔▄ć▌å▄ćĹö[ŚUĘ└š▌åĮM│╔Ż¼2éĆ▄ć▌åĄ─▌SŠĆį┌═¼ę╗ų▒ŠĆ╔ŽŻ¼Ęųäeė╔2┼_ų▒┴„┴”ŠžļŖÖCų▒Įė“īäėŻ¼į┌▄ćĹĄ─ā╚▓┐░▓čbėąąŅļŖ│žū¾ėęų▒┴„┴”ŠžļŖÖCŠÄ┤aŲ„āAĮŪé„ĖąŲ„═ė┬▌āx¤oŠĆé„▌ö─ŻēKĄ╚Ż¼┐žųŲąĪ▄ćĄ─ūįŲĮ║ŌŻ¼£y┴┐ū¾ėę▄ć▌åĄ─ą²▐DĮŪČ╚ĪŻŽĄĮy▓╔ė├Ą─é„ĖąŲ„░³└©āAĮŪé„ĖąŲ„═ė┬▌āxŠÄ┤aŲ„Ż¼═©▀^╦³éā┐╔ęį£y┴┐║═ėŗ╦Ń│÷ąĪ▄ćĄ─ĀŅæBģóöĄŻ¼ŲõųąŻ¼▄ć¾wāAĮŪ╦┘Č╚Ęųäeė╔āAĮŪé„ĖąŲ„═ė┬▌āxų▒Įė£y┴┐Ż¼ū¾ėę▄ć▌åą²▐DĮŪČ╚┐╔ė╔ŠÄ┤aŲ„£y┴┐Ż¼═©▀^╬óĘų┐╔ęįėŗ╦Ńū¾ėę▄ć▌åĄ─ĮŪ╦┘Č╚Ż¼▀MČ°═Ų╦Ń│÷ū¾ėę▄ć▌åĄ─ąą±é╦┘Č╚Ż¼▄ć¾wĄ─Ū░▀M╦┘Č╚Ż¼ąĪ▄ćį┌Ąž├µĄ─ą²▐DĮŪ╦┘Č╚ĪŻ
▌å╩ĮÖCŲ„╚╦ę“ŲõŠ▀ėą┴╝║├Ą─ęŲäėąį─▄ę╗ų▒éõ╩▄ĻPūóŻ¼ć°ā╚═ŌįSČÓīWš▀Å─└ĒšōĘĮȰ蹊┐┴╦╦³Ą─▀\äėęÄäØ▄ē█EĖ·█Ö┐žųŲĘĮĘ©Ż¼▓ó╚ĪĄ├┴╦║▄ČÓ│╔╣¹ĪŻ
ā╔▌å╩ĮÖCŲ„╚╦Ż¼═¼Ģrę▓╩Ūę╗éĆĄ╣┴óö[ŽĄĮyŻ¼ī”╦³Ą─▀\äė▀Mąą┐žųŲĢrąĶę¬▒Ż│ųŽĄĮyĄ─ŲĮ║ŌĀŅæBÖCŲ„╚╦Ė·█Ö─┐ś╦Ż¼╩ūŽ╚ę¬ė╔ęĢėX▓┐Ęųū„×ķÖCŲ„╚╦Ą─č█Š”Ż¼═Ļ│╔ūRäe─┐ś╦Ą─╬╗ų├╦┘Č╚ĘĮŽ“Ą╚ą┼ŽóĄ─╚╬䚯¼▀@ą®ą┼Žó╩Ūū÷│÷š²┤_øQ▓▀Ą─╗∙ĄAęĢėXŽĄĮyąĶꬳDŽ±▓╔╝»įOéõŻ¼░³└©özŽ±Ņ^║═▓╔╝»┐©Ą╚ā╔▌å╩ĮęŲäėĄ╣┴óö[ÖCŲ„╚╦▀Ćø]ėąčbéõęĢėXŽĄĮyŻ¼×ķ┴╦Öz£yĄ╣┴óö[ÖCŲ„╚╦Ė·█Ö─▄┴”Ż¼─ŻöM┴╦ę╗éĆ╠ōöMĄ─Ė·█Ö─┐ś╦Ż¼PCÖC═©▀^¤oŠĆ─ŻēK▓╗öÓīó─┐ś╦╬╗ų├░l╦═ĮoÖCŲ„╚╦Ż¼╣®ÖCŲ„╚╦øQ▓▀Ą╣┴óö[ÖCŲ„╚╦Ą─╬╗ų├┐╔ęį═©▀^ūį╔ĒĄ─é„ĖąŲ„½@╚ĪĪŻ
5 ĮY╩°šZ
ŠC╔Ž╦∙╩÷Ż¼į┌▀MąąÖCąĄ▓󹹎ĄĮyĄ─įOėŗ▀^│╠ųąę¬Ė∙ō■įOėŗĄ─ąĶŪ¾▀Mąąßśī”ąįĄ─įOėŗŻ¼Ę└ų╣Ż¼ė╔ė┌įOėŗ▀^│╠ųąĄ─▒│▓╗«öī¦ų┬┴╦║¾Ų┌ÖCąĄ╚╦į┌╩®╣ż▀^│╠ųąÄ¦üĒĄ─ųTČÓå¢Ņ}Ż¼░lō]įOėŗš▀Ą─ū„ė├ĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://m.vmgcyvh.cn/
▒Š╬─ś╦Ņ}Ż║ÖCŲ„╚╦ÖCąĄŽĄĮy▓óąąįOėŗĄ──Ż╩Į╠Įėæ
▒Š╬─ŠWųĘŻ║http://m.vmgcyvh.cn/html/solutions/14019319069.html