ļSų°║Į┐šųŲįņ╝╝ągĄ─▓╗öÓ░lš╣Ż¼ć°ļH║Į┐š╩ął÷Ą─ĖéĀÄīó╚š┌ģ╝ż┴ęĪŻ«öĮ±Ż¼«aŲĘ┘|┴┐ęčÅ─ĖéĀÄĄ─“½@ä┘ś╦£╩”č▌ūā×ķĖéĀÄĄ─“┘YĖ±ś╦£╩”Ż¼Č°ŪęŻ¼’wÖCŠ▀ėąĖ▀░▓╚½ĪóĖ▀┐╔┐┐ąįĄ─ę¬Ū¾Ż¼ę“┤╦Ż¼║Į┐š«aŲĘĄ─┘|┴┐«É│Żųžę¬ĪŻ╚²ū°ś╦£y┴┐ÖCū„×ķ¼F┤·╗»Ž╚▀MÖz£yįOéõų«ę╗Ż¼▒╗ÅVĘ║Ąžæ¬ė├ĄĮ’wÖC┴Ń▓┐╝■╝░Ųõ╣żčbĄ─Öz£yųąĪŻąĶę¬╩╣ė├CMMÖz£yĄ─┴Ń▓┐╝■öĄ┴┐š²į┌╝▒äĪį÷╝ėŻ¼ęį╔Ž║Ż’wÖCųŲįņėąŽ▐╣½╦ŠĄ─╣żčb┴Ń▓┐╝■Ą─Öz£y×ķ└²Ż¼2010Ī½2012─ĻŲ┌ķgė├CMMÖz£yĄ─┴Ń▓┐╝■öĄ┴┐ČÓ▀_2000ČÓ╝■(▓╗░³└©’wÖC▒Š¾w╝■Ą─£y┴┐öĄ┴┐)ĪŻ
├┐╝■«aŲĘĄ─£y┴┐Č╝ąĶꬊÄųŲū°ś╦£y┴┐ÖC£y┴┐ėŗäØŻ¼Ųõųą░³└©«aŲĘ▒╗£y³cĄ─ū°ś╦ųĄ╝░ĘĮŽ“╩Ė┴┐ųĄĄ─╠ß╚Ī╣żū„ĪŻ«ö▒╗£y³cöĄ┴┐▒ŖČÓĄ─Ģr║“Ż¼öĄųĄĄ─╠ß╚Īīó╗©┘M║▄ČÓĢrķgŻ¼═©│Ż╠ß╚Ī100³cĄ─öĄųĄąĶę¬1hū¾ėęĪŻöĄųĄ╠ß╚Ī╣żū„į┌CATIA▓┘ū„ŲĮ┼_ųą▀MąąŻ¼╠ß╚Ī▀^│╠╩Ūę╗ŽĄ┴ąĄ─Ę┤Å═ųžÅ═▓┘ū„Ż¼Č°CATIA×ķė├æ¶╠ß╣®┴╦Visual BasicĪóVC++Č■┤╬ķ_░lĮė┐┌(Automation API)Ż¼ŲõųąVC++Š═░³║¼2ĘNĘĮĘ©Ż¼▀@╩╣³cöĄųĄĄ─ūįäė╠ß╚Ī│╔×ķ┐╔─▄ĪŻ³cöĄųĄūįäė╠ß╚Ī┐╔ęį╠ßĖ▀╣żū„ą¦┬╩Ż¼į┌╔·«a╚╬䚊oŲ╚Ą─ŪķørŽ┬Ųõą¦╣¹ė╚×ķ’@ų°Ż¼┐╔ęį┐sČ╠┴Ń▓┐╝■Ą─Į╗ĖČų▄Ų┌ĪŻ
▒Š╬─ī”³cöĄō■Ą─╠ß╚Ī▀^│╠╝░CATIAĄ─ŽÓĻP▓┘ū„├³┴Ņ▀Mąą┴╦╝Üų┬Ą─Ęų╬÷Ż¼š¹└Ē│÷┴╦öĄō■ūįäė╠ß╚ĪĄ─śŗ╦╝ĪŻ╬─ųąī”CATIA╠ß╣®Ą─ĻPė┌³cöĄō■╠ß╚ĪĄ─Č■┤╬ķ_░lĮė┐┌║»öĄĄ─╣”─▄▀Mąą┴╦╠Į╦„Ż¼šę│÷┴╦öĄō■╠ß╚ĪĄ─ūŅ╝č║»öĄ╝░═ŠÅĮŻ¼ūŅĮKŻ¼═©▀^VB═Ļ│╔┴╦öĄō■╠ß╚Ī│╠ą“Ą─ŠÄųŲĪŻ
öĄō■╠ß╚ĪĄ─Ą┌ę╗éĆĻPµI³cŻ║½@╚Ī▒╗╠ß╚ĪöĄō■³cĄ─ĻP┬ō├µĪóĻP┬ōŠĆ/▌SŠĆĪŻ╩ųäė▓╔╝»ĘĮŽ“╩Ė┴┐ĢrŻ¼┐╔ęį─┐ęĢ▓ó▀x╚Ī▒╗£y³cĄ─ĻP┬ōį¬╦ž(ŠĆĪó├µ)Ż¼Ą½ėŗ╦ŃÖC╚ń║╬┼ąöÓ▒╗£y³cĄ─ĻP┬ōį¬╦ž─ž?╬─ųąĘų╬÷┴╦½@Ą├├µ³cĄ─ĘĮŽ“╩Ė┴┐ĻP┬ō├µĄ─ĘĮĘ©╝░½@╚Ī┐ū³cĄ─ĘĮŽ“╩Ė┴┐ĻP┬ōŠĆ/▌SŠĆĄ─ĘĮĘ©Ż¼Å─Č°×ķ³cöĄō■Ą─ūįäė╠ß╚ĪĄņČ©┴╦╗∙ĄAĪŻ
öĄō■╠ß╚ĪĄ─Ą┌Č■éĆĻPµI³cŻ║ūįäėīżšęĪó┼ąöÓ³cĄ─£y┴┐╩Ė┴┐ĘĮŽ“(╝┤╚²ū°ś╦£y┴┐ÖCĄ─£y┴┐ĘĮŽ“)ĪŻ³cčžų▒ŠĆ┐╔ęįėąŽÓĘ┤Ą─2éĆ╩Ė┴┐ĘĮŽ“Ż¼╬─ųą╠ß│÷┴╦┼ąöÓš²┤_╩Ė┴┐ĘĮŽ“Ą─ĘĮĘ©ĪŻ
▒Š╬─▀Ćöó╩÷┴╦öĄō■╠ß╚Ī▀^│╠ųą▌oų·įOų├▒╗£y³cĄ─ĘĮĘ©ęįīŹ¼F▒╗£y³cĄ─┐ņ╦┘Īó£╩┤_ĪóĘĮ▒ŃĄ─įOų├Ż¼ę▓ī”═©▀^VBšZčįīŹ¼Fū°ś╦▐DōQĄ─ĘĮĘ©▀Mąą┴╦šf├„Ż¼▀@ą®ĘĮĘ©Č╝üĒūįė┌╣żū„īŹ█`ųąĄ─├■╦„┼c╦╝┐╝ĪŻ
CMMÖz£y³cöĄō■│ŻęĽ@╚ĪĘĮĘ©ĮķĮB
³cöĄō■│ŻęĽ@╚ĪĘĮĘ©(ąĶę¬CATIAŠ▀ėąĖ▀╝ēÖCąĄ╝ė╣ż─ŻēK)┴„│╠╚ńłD1╦∙╩ŠĪŻ

łD1 │ŻęijcöĄō■½@╚ĪĘĮĘ©┴„│╠łD
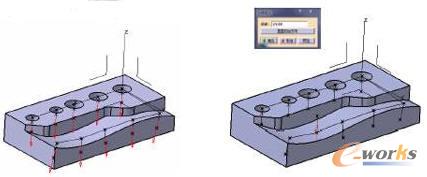
1.įOų├▒╗£y³c
╩╣ė├CATIAĄ─“³c”├³┴ŅŻ¼▀x╚Ī┐ūĪóŪ·├µĪóŲĮ├µĪó▌SŠĆĄ╚Ż¼į┌öĄ─Ż╔ŽĮ©┴óąĶę¬£y┴┐Ą─³cĪŻųžÅ═╔Ž╩÷▓┘ū„Ż¼═Ļ│╔╦∙ėą³cĄ─įOų├ĪŻ
2.┤“┐ū³c
(1)ŪąōQĄĮCATIAĄ─Ė▀╝ēÖCąĄŲĮ┼_Ż¼ļpō¶CATIAĮYśŗśõ╔ŽĄ─“Part Operation”ęįÅŚ│÷┤░┐┌ĪŻ³cō¶ÅŚ┤░░┤Ōo“Machine”Ż¼╚╗║¾³cō¶░┤Ōo“5-axis Machine”Ż¼³c“┤_Č©”ĪŻ³cō¶░┤Ōo“Reference Machining Axis System”Ż¼▓ó┤_Č©įŁ³c╝░XĪóYĪóZ▌SĄ─ĘĮŽ“(³cÅŚ┤░ųąĄ─įŁ³c/▌SŻ¼į┘į┌öĄ─Żųą▀xō±į¬╦žū„×ķįŁ³c/▌S)Ż¼³c“┤_Č©”ĻPķ]ÅŚ┤░ĪŻ
(2)³cCATIAĄ─╣żŠ▀Śl░┤Ōo“Spot Drilling”Ż¼³cöĄ─ŻŻ¼ÅŚ│÷³cŃ@┤░┐┌ĪŻ³cÅŚ┤░łDą╬╔ŽĄ─“Click to Select a Part Surface”Ż¼╚╗║¾į┌öĄ─Ż╔Ž▀x╚Ī┤_Č©ĘĮŽ“╩Ė┴┐Ą─ų¦ō╬├µŻ¼³c░┤Ōo“OK”ĘĄ╗ž(╗“╩¾ś╦ļpō¶öĄ─Ż┐šķg┐š░ū╠ÄĘĄ╗ž)ĪŻ³cÅŚ┤░łDą╬╔ŽĄ─“Click to Add Position”Ż¼▓óį┌öĄ─Żųą▀x╚Ī╔Ž╩÷ųąįOų├Ą─³cŻ¼ļpō¶öĄ─Ż┐šķg┐š░ū╠ÄĘĄ╗žĪŻėęµI³cō¶“Fixed Axis”,į┌ÅŚ│÷▓╦å╬ųą³c▀x“Normal To PS Axis”Ż¼ęį╩╣ĘĮŽ“╩Ė┴┐┤╣ų▒ė┌ų¦ō╬├µĪŻ³cō¶ÅŚ┤░łDą╬╔ŽĄ─ĘĮŽ“╝²Ņ^“Click to Invert the Tool Axis”Ż¼▓óė^▓ņöĄ─Ż┤░┐┌ųąĄ─╩Ė┴┐ĘĮŽ“ųĖ╩Š╝²Ņ^Ż¼┤_▒Ż╩Ė┴┐ĘĮŽ“ųĖŽ“«aŲĘā╚▓┐ĪŻį┌ÅŚ┤░ųąŪąōQĄ┌1éĆÅ═║Ž┤░┐┌Ż¼╚╗║¾╚ĪŽ¹▀xō±┐““Output CYCLE syntax”ųąĄ─╣┤▀xŻ¼▓óīó“ApprOAch clearance”įOų├×ķ0ĪŻ
(3)ųžÅ═▓Į¾E(2)Ż¼ųéĆ═Ļ│╔╦∙ėą³cĄ─ĘĮŽ“╩Ė┴┐Ą─įOų├ĪŻ
3.öĄō■▌ö│÷╝░▀x╚Ī
³cō¶CATIA╣żŠ▀Śl├³┴Ņ“Generate NC Code in Batch Mode”ęį▌ö│÷╬─▒Š╬─╝■Ż¼╚╗║¾ė├ėø╩┬▒Š┤“ķ_▌ö│÷Ą─╬─▒Š╬─╝■Ż¼▓óÅ─ųą╠¶▀x│÷ąĶꬥ─ū°ś╦Īó╩Ė┴┐öĄō■ĪŻ
┐éų«Ż¼╩ų╣ż▓╔³cĄ─š¹éĆ▀^│╠ėą║▄ČÓųžÅ═ĪóĘ▒¼ŹĄ─╣żū„Ż¼╠žäe╩Ū«ö▓╔³cöĄ┴┐ČÓĢrŻ¼╣żū„┴┐║▄┤¾ĪŻ
CMMÖz£y³cöĄō■ūįäė╠ß╚Ī╝╝ągĄ─īŹ¼F
1.Öz£y³cöĄō■ūįäė╠ß╚Ī┴„│╠Ęų╬÷
ūx╚Ī/ūRäeöĄ─ŻÄū║╬łDą╬╝»╔ŽįOų├Ą─▒╗£y³cŻ¼Ęų╬÷³c▓óšę│÷ŲõĻP┬ōį¬╦ž(ų¦ō╬į¬╦ž)Ż¼Ė∙ō■ī┘ąį┼ąöÓĻP┬ōį¬╦žĄ─ŅÉą═(├µĪółAĪóÖEłA)ĪŻĖ∙ō■├µĪółAĪóÖEłAĄ─ąį┘|Ż¼Ęųäe└LųŲ┤_Č©³cĘĮŽ“╩Ė┴┐Ą─ų▒ŠĆĪŻ═©▀^ŽÓĻPĮė┐┌║»öĄĄ├ĄĮįŁ╩╝ū°ś╦ŽĄŽ┬³cĄ─ū°ś╦ųĄ╝░ĘĮŽ“╩Ė┴┐ųĄŻ¼═©▀^ū°ś╦▐DōQ▀\╦ŃŻ¼½@Ą├ųĖČ©ū°ś╦ŽĄŽ┬Ą─ū°ś╦ųĄ╝░ĘĮŽ“╩Ė┴┐ųĄĪŻ░┤CMMąĶŪ¾Ą─Ė±╩Į▌ö│÷╬─▒ŠĪŻęį╔Ž▀^│╠ė╔ėŗ╦ŃÖCūįäė═Ļ│╔ĪŻ┴„│╠ęŖłD2ĪŻ

łD2 öĄō■╠ß╚Ī┴„│╠łD
2.³cöĄō■ūįäė╠ß╚ĪĻPµI╣”─▄Ą─īŹ¼F
(1)╠ßĖ▀įOų├▒╗£y³cĄ─ą¦┬╩ĪŻ
═©▀^Catia.StartCommand(“³c”)Īó Catia.StartCommand(“▌SŠĆ... ”)ĪóCatia.StartCommand(“╠Ņ│õ”)šZŠõŻ¼īŹ¼FĮ©┴ó▒╗£y³cĢrŻ¼ųŪ─▄┤“ķ_CATIAĄ─Į©├µ³c╝░┐ū³c┤░┐┌Ż¼▌oų·▒╗£y³cĄ─Į©┴óŻ¼ęį┐ņ╦┘═Ļ│╔▒╗£y³cĄ─įOų├ĪŻ┤╦═ŌŻ¼┐╔ęįį÷╝ė³cŠÓŽ▐ųŲ╣”─▄Ż¼į┌įOų├├µ³cĢrŻ¼═©▀^HybridShapes.Item(i).Offset.ValueūįäėŽ▐ųŲą┬įOų├³c┼c╔Žę╗éĆįOų├³cĄ─ŠÓļxŻ¼Å─Č°┤_▒ŻįOų├Ą─³cŠÓØMūŃŽÓĻPęÄĘČĄ─ę¬Ū¾ĪŻ“³c”Īó“▌SŠĆ...”Īó“╠Ņ│õ”Ą╚üĒį┤ė┌CATIAĄ─“ūįČ©┴x”┤░┐┌ųąĄ─“├³┴Ņ”ųąĄ─“╦∙ėą├³┴Ņ”Ż¼«ö╚╗Ż¼į┌┤╦┤░┐┌ųąūįČ©┴xĄ─äe├¹ę▓═¼śėėąą¦ĪŻ
(2)┤_Č©╠ß╚Ī│╠ą“─▄ūRäeĄ─┤_Č©▒╗£y³cĘĮŽ“╩Ė┴┐Ą─ĻP┬ōį¬╦žĪŻ
ūī│╠ą“ūRäe│÷▒╗£y³cĄ─┤_Č©³cĘĮŽ“╩Ė┴┐Ą─ĻP┬ōį¬╦ž╩Ū╠ß╚Ī╝╝ągĄ─ĻPµIų«ę╗ĪŻCATIAĮ©³cėą╚ńŽ┬╠ž³cŻ║▒╗Į©³c┼cöĄ─Ż┴Ń╝■▓╗ī┘ė┌═¼ę╗┴Ń╝■ĢrŻ¼Į©³cĢrCATIAĢ■ūįäė╠ß╚Ī³cĄ─ĻP┬ō├µĪóŠĆĄ╚ĄĮ▒╗Į©³c╦∙į┌Ą─┴Ń╝■ųąĪŻ└¹ė├┤╦╠žąįŻ¼į┌öĄ─Ż«aŲĘųąą┬Į©┴Ń╝■clsj.CATPart(│╠ą“ūįäė═Ļ│╔)Ż¼īó╦∙ėą▒╗£y³c╚½▓┐Į©┴óį┌┤╦┴Ń╝■ųą(╝┤į┌Į©³cĢr╝ż╗Ņįō┴Ń╝■)Ż¼╚ńłD3╦∙╩ŠŻ¼“³c.1”╩Ū╩ų╣żĮ©┴óĄ─Ż¼“Ū·├µ.1”╩ŪCATIAūįäė«a╔·Ą─▌oų·į¬╦žĪŻ

łD3 Į©┴óą┬┴Ń╝■ūīCATIAūįäėĮ©┴óĻP┬ō├µ
(3)╩╣│╠ą“į┌CATIA╗“DELMIAŽ┬Č╝─▄▀\ąąĪŻ
╩╣ė├Ž┬┴ąšZŠõŻ¼īŹ¼F│╠ą“į┌CATIA╗“DELMIAŁhŠ│Ž┬Č╝─▄▀\ąąĪŻŲõųą“If”šZŠõ║▄ĻPµIŻ¼«ö─Ńø]┤“ķ_CATIAŻ¼Č°┤“ķ_DELMIAĢrŻ¼“If”šZŠõĄ─Śl╝■Ą─┼ąöÓīó×ķšµŻ¼┤╦║¾Ż¼īół╠ąą“Set catia=GetObject(Ż¼ “DELMIA.Application”)”šZŠõŻ¼Č°╩╣│╠ą“┼cDELMIAĮ©┴ó═©ą┼┬ōŽĄĪŻ
Dim catia As Object
Set catia=GetObject(Ż¼“CATIA.Application”)
If catia Is Nothing Or Len(catia.Caption)=0 Then
On Error Resume Next
Set catia=GetObject(Ż¼“DELMIA.Application”)
End If
Set GetCATIA=catia
(4)┤_Č©ĘĮŽ“Ž“┴┐ĪŻ
╩ūŽ╚Ż¼ę¬Į©┴ó┤_Č©ĘĮŽ“Ž“┴┐Ą─ų▒ŠĆŻ¼ŽÓĻPĮė┐┌Ą─║»öĄ
×ķAddNewPointOnPlaneĪóAddNewPointOnSurfaceĪóAddNew PointOnCurveWithReferenceFrom Distance╝░AddNewLinePtPtĪóAddNewLinePtDirĄ╚ĪŻ
Ųõ┤╬Ż¼▀MąąĘĮŽ“Ž“┴┐ĘĮŽ“Ą─┼ąöÓĪŻ═©▀^ĘĮŽ“ųĖę²ŠĆ─®Č╦³cĄĮöĄ─ŻīŹ¾wĄ─ŠÓļx┼ąöÓĘĮŽ“Ž“┴┐Ą─ĘĮŽ“ĪŻīŹ¼FĘĮ╩ĮŻ║═©▀^Č╦³c└LųŲ░ļÅĮ×ķ0.0005mmĄ─Ū“├µŻ¼╚╗║¾═©▀^║»öĄcat DistanceComputationTypeAgainstAllėŗ╦ŃŪ“ĄĮöĄ─ŻĄ─ŠÓļxŻ¼┤╦ŠÓļx┼cųĖę²ŠĆķLČ╚▀Mąą▒╚▌^║¾┐╔┤_Č©▒╗£y³cĘĮŽ“Ž“┴┐Ą─š²┤_ĘĮŽ“Ż╗┤╦═ŌŻ¼ę▓┐╔ęį└¹ė├┐ū▌SŠĆĄ─ķ_╩╝³cĪóųą³cĪóĮY╩°³c┼ąöÓĘĮŽ“Ż¼╩╣ė├Įė┐┌║»öĄGetPointsOnCurve┐╔ęįĄ├ĄĮ▌SŠĆĄ─╔Ž╩÷3éĆ³cĄ─ū°ś╦ųĄŻ¼ėŗ╦Ń▒╗┼ąöÓ³cĄĮ▌SŠĆķ_╩╝³cĄ─ŠÓļxŻ¼ŠÓļx┤¾š▀×ķąĶꬥ─┤_Č©ĘĮŽ“Ž“┴┐Ą─³cĪŻ
ūŅ║¾Ż¼┐╔ęį═©▀^Įė┐┌║»öĄGetXValĪóGetYValĪóGetZValĘųäe½@╚ĪųĖę²ŠĆŽÓī”ė┌įŁ╩╝ū°ś╦ŽĄĄ─ĘĮŽ“Ž“┴┐Ą─XĪóYĪóZĘĮŽ“Ą─ļpŠ½Č╚ĘųŽ“┴┐ųĄ,┤╦ĘĮŽ“┤·▒Ēū°ś╦£y┴┐ÖC£yßśĄ─▀\ąąĘĮŽ“Ż¼Ą½Ųõū°ś╦ŽĄ╩ŪįŁ╩╝ū°ś╦ųĄĪŻ
(5)▀Mąąū°ś╦▐DōQĪŻ
╩╣ė├CATIAĄ─Įė┐┌║»öĄ“GetPoint”Īó“GetAxisSystem”╝░“GetXVal”Īó“GetYVal”Īó“GetZVal”┐╔ęįūī│╠ą“ūįäėĄ├ĄĮ³cĄ─ū°ś╦ųĄ╝░ĘĮŽ“╩Ė┴┐ųĄĪŻė╔ė┌╩╣ė├Įė┐┌║»öĄĄ├ĄĮĄ─³cū°ś╦/ĘĮŽ“Ž“┴┐ųĄČ╝╩ŪŽÓī”ė┌įŁ╩╝ū°ś╦ŽĄĄ─Ż¼ę“┤╦Ż¼ąĶę¬ī”ū°ś╦▀Mąą▐DōQŻ¼īóįŁ╩╝ū°ś╦ŽĄū°ś╦ųĄ▐DōQ×ķųĖČ©ū°ś╦ŽĄŽ┬Ą─ū°ś╦ųĄĪŻ
ū°ś╦▐DōQĘĮĘ©Ż║ßśī”öĄ─Ż┴Ń╝■“Part1”Ż¼įOO▌SŽĄĮy×ķ┴Ń╝■“Part1”Ą─įŁ╩╝ū°ś╦ŽĄŻ¼O1▌SŽĄĮy×ķ┴Ń╝■“Part1”Ą─▌SŽĄĮy1Ż¼X0ĪóY0ĪóZ0┼cX1ĪóY1ĪóZ1Ęųäe×ķO1▌SŽĄĮyĄ─įŁ³cQ1Īó┐šķg³cPį┌įŁ╩╝ū°ś╦ŽĄŽ┬Ą─ū°ś╦ųĄŻ¼─┐ś╦╩ŪŪ¾³cPį┌▌SŽĄĮy1Ž┬Ą─ū°ś╦ųĄXĪóYĪóZĪŻ
═©▀^VXx=CATIA.ActiveDocument. Part.Parameters.Item(“Part1\▌SŽĄĮy.1\X ▌S\X”).ValuešZŠõ(ūóŻ║“Part1\▌SŽĄĮy.1\X ▌S\X”╩ŪĖ∙ō■CATIAųąśõĮYśŗųąĄ─▌SŽĄĮyģóöĄśŗĮ©Ą─Ż¼ąĶ┼cCAITAĄ─ė├æ¶Įń├µšZčįŽÓĘ¹Ż¼«öCATIAĄ─ė├æ¶Įń├µšZčį▀xō±ėóšZĢrŻ¼ätæ¬×ķ“Part1\ AxisSystem.1\XAxis\X”)┐╔ęįĄ├ĄĮ┴Ń╝■“Part1”Ą─“▌SŽĄĮy.1”Ą─X′▌SĘĮŽ“Ą─å╬╬╗Ž“┴┐čžįŁ╩╝ū°ś╦ŽĄX▌SĄ─ĘųŽ“┴┐VXxĪŻ═¼└Ē┐╔Ą├Y′▌SĘĮŽ“Ą─å╬╬╗Ž“┴┐čžįŁ╩╝ū°ś╦ŽĄX▌SĄ─ĘųŽ“┴┐VYxĪŻÅ─Č°┐╔Ū¾│÷“▌SŽĄĮy.1”Ė„▌SĘĮŽ“Ą─å╬╬╗Ž“┴┐į┌įŁ╩╝ū°ś╦ŽĄ╔ŽĄ─Ė„ĘųŽ“┴┐×ķŻ║VXxĪóVXyĪóVXzĪóVYxĪóVYyĪóVYzĪóVZxĪóVZyĪóVZzĪŻXoĪóYoĪóZo┼cX1ĪóY1ĪóZ1┐╔═©▀^CATIAĮė┐┌║»öĄų▒Įė½@╚ĪĪŻĘųäeŪ¾Ž“┴┐O1Pį┌įŁ╩╝ū°ś╦ŽĄŽ┬Ą─Ė„ĘųŽ“┴┐Ż¼┐╔Ą├Ž┬┴ąĘĮ│╠ĮMŻ║

Ū¾ĮŌ╔Ž╩÷ĘĮ│╠ĮMŻ¼┐╔ęįĄ├ĄĮP³cÅ─įŁ╩╝ū°ś╦ŽĄ▐DōQĄĮ▌SŽĄĮy1║¾Ą─ū°ś╦ųĄXĪóYĪóZĪŻīóū°ś╦▐DōQŠÄųŲ│╔ūė║»öĄŻ¼ęį▒Ńė┌ū°ś╦▐DōQĢrš{ė├ĪŻ
(6)³cĄ─ĘĮŽ“Īó╚Ī³c┬ĘÅĮĘĮŽ“╝░ĘĮŽ“Ž“┴┐Ą─š{š¹ĪŻ
═©▀^Catia.StartCommand(“ACA Invert”)Ż¼īŹ¼F³cĄ─ĘĮŽ“Ž“┴┐(╚ńłD4ū¾łD╦∙╩ŠŻ¼łDųąĄ─╝²Ņ^ĘĮŽ“╝┤×ķ³cĄ─ĘĮŽ“Ž“┴┐Ą─ĘĮŽ“)╝░╚Ī³c┬ĘÅĮĒśą“ĘĮŽ“Ą─’@╩ŠŻ¼▀@ĘN’@╩Š▒Ńė┌Įž╚Īą╬Ž¾Ą─╩ŠęŌłDĪŻĘĮŽ“Ž“┴┐Ą─š{š¹Ż║═©▀^Set hybridShapeInverse1=hybridShapeFactory1.AddNewInverse(reference1Ż¼1)╝░ hybridBody1.AppendHybridShape hybridShapeInverse1īŹ¼FĮoĘĮŽ“ŠĆ(reference1)╠Ē╝ėĘ┤▐DŠĆŻ¼╚╗║¾Ż¼╩╣ė├Timer▀^│╠▒O┐žĘ┤▐DŠĆĄ─ĘĮŽ“Ż¼«ö░l¼FĘĮŽ“ūā╗»ĢrŻ¼╩╣│╠ą“┐žųŲöĄ─Żū÷ŽÓæ¬Ą─ūā╗»Ż¼▓óųžą┬╠ß│÷įō³cĄ─ĘĮŽ“Ž“┴┐Ż¼ī”┐ū³c═¼Ģr╠ß╚Īą┬Ą─³cū°ś╦Ż¼Å─Č°īŹ¼Fī”ęč╠ß╚ĪöĄō■Ą─³cĄ─ĘĮŽ“Ž“┴┐Ą─š²Ę┤š{š¹ĪŻ
łD4 ĘĮŽ“Ą─’@╩Š(ū¾)╝░ĘĮŽ“Ž“┴┐š²Ę┤š{š¹(ėę)
³cöĄō■ūįäė╠ß╚Ī│╠ą“ĮķĮB
│╠ą“Įń├µ╝░ūŅĮK▌ö│÷öĄō■(³cū°ś╦ĪóĘĮŽ“╩Ė┴┐Īóī”ė┌┐ū▀Ćīó▌ö│÷┐ū░ļÅĮ)╚ńłD5╦∙╩ŠĪŻ
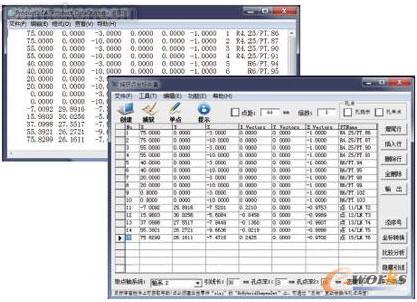
łD5 Įń├µ╝░▌ö│÷öĄō■╬─╝■
ūįäė╠ß╚Ī▒╗£y³cū°ś╦ĪóĘĮŽ“╩Ė┴┐Ą─▓┘ū„šf├„Ż║³c“äōĮ©”Ż╗═©▀^“╚Ī³c▌SŽĄĮy”▀xō±£y┴┐ū°ś╦ŽĄŻ╗³c“╠ß╩Š”(░³║¼▌oų·įOų├³cĄ─╣”─▄)Ż¼▓ó░┤╠ß╩Šą┼Žóį┌öĄ─Ż╔ŽįOų├├µ╗“┐ūĄ─▒╗£y³cŻ╗╩╣ė├“▓Č½@”ūįäė╔·│╔▒╗£y³cĄ─ū°ś╦ųĄ╝░ĘĮŽ“╩Ė┴┐Ż╗ė^▓ņĘĮŽ“Ž“┴┐╝²Ņ^Ż¼┐┤£y³cĄ─ĘĮŽ“Ž“┴┐╩Ūʱš²┤_Ż¼╚╗║¾ĻPķ]Invert┤░┐┌Ż¼ī”┐╔─▄▓╗š²┤_Ą─ĘĮŽ“Ž“┴┐▀Mąąļpō¶╝ż╗Ņ▓ó╚ĪĘ┤Ż╗³c“ļ[▓žę²ŠĆ”ęįļ[▓žųĖę²ŠĆ▓ó’@╩Š╚Ī³cĄ─Ēśą“╝²Ņ^Ż╗ūŅ║¾³c“▌ö│÷”Ą├ĄĮąĶꬥ─³cū°ś╦╝░ĘĮŽ“╩Ė┴┐öĄō■╬─▒Š╬─╝■ĪŻ
³cöĄō■ūįäė╠ß╚Ī│╠ą“Ą─3éĆ’@ų°ā׳c╩ŪŻ║Ą┌ę╗Ż¼╦³─▄ē“▌oų·ėŗäØ╚╦åTįOų├▒╗£y³cŻ¼│╠ą“īóūįäėš{│÷įOų├├µ³cĪó┐ū³cĄ─ī”įÆ┤░┐┌Ż¼░┤ąĶūįäėŽ▐ųŲ╦∙╚Ī├µ³cĄ─³cŠÓŻ¼║▄┤¾│╠ą“╔Ž╠ßĖ▀┴╦³cĄ─įOų├ą¦┬╩Ż¼▓óį÷╝ė┴╦“┤_Č©”░┤Ōo┐ņĮ▌µIŻ¼▀Mę╗▓ĮĘĮ▒Ń┴╦▓┘ū„Ż╗Ą┌Č■Ż¼╦³ā×╗»┴╦┐ū³cĄ─▓┘ū„Ż¼╩ųäė▓┘ū„ĢrŻ¼ąĶę¬įOų├┐ū³cĄ─Ž┬│┴┴┐╝░▌oų·ŲĮ├µŻ¼«öąĶę¬£y┴┐┤╣ų▒Č╚ĢrŻ¼▀ĆąĶę¬įOų├2éĆŽ┬│┴³c╝░▌oų·ŲĮ├µŻ¼╩╣ė├ūįäė╠ß╚Ī│╠ą“ätų╗ąĶę¬įOų├1éĆ³cŪę▓╗ąĶę¬▌oų·ŲĮ├µŻ¼ėŗäØåT░┤│╠ą“╠ß╩Š▀xō±ąĶę¬╠ß╚Ī1éĆ╗“2éĆ┐ū³cŻ╗Ą┌╚²Ż¼╦³─▄ē“Ė∙ō■įOų├Ą─³cūįäė╠ß╚Ī³cū°ś╦║═ĘĮŽ“╩Ė┴┐Ż¼▒▄├Ō┴╦Ę▒¼ŹĄ─“┤“┐ū³c”▓┘ū„║═öĄō■Ą─║Y▀x╣żū„ĪŻ▀@ą®ā׳cīŹ¼F┴╦³cū°ś╦╝░╩Ė┴┐ųĄĄ─┐ņ╦┘╠ß╚ĪŻ¼▒▄├Ō┴╦╚╦×ķĄ─▓┘ū„╩¦š`Ż¼śO┤¾╠ßĖ▀┴╦▓╔╝»öĄō■Ą─ą¦┬╩║═£╩┤_ąįĪŻ
ĮY╩°šZ
ļSų°’wÖCįOėŗ╦«ŲĮĪóųŲįņ╝╝ąg╦«ŲĮĄ─╠ßĖ▀Ż¼’wÖC┴Ń▓┐╝■Ą─ųŲįņŠ½Č╚ę¬Ū¾ę▓īóįĮüĒįĮĖ▀Ż¼ąĶę¬▀Mąąū°ś╦£y┴┐ÖC£y┴┐Ą─┴Ń▓┐╝■öĄ┴┐ę▓īó▓╗öÓį÷ČÓĪŻ╚²ū°ś╦£y┴┐ÖCęįŲõĖ▀Š½Č╚ĪóĖ▀╚ßąį╝░ā׫ɥ─öĄūų╗»─▄┴”Ż¼│╔×ķ¼F┤·ųŲįņśIė╚Ųõ╩Ū─ŻŠ▀╣żśIįOėŗĪóķ_░lĪó╝ė╣żųŲįņ║═┘|┴┐▒ŻūCĄ─ųžę¬╩ųČ╬ĪŻ│õĘųĘų╬÷Ė„öĄūų╗»Öz£yŽĄĮyĄ─ąį┘|╝░Ė„æ¬ė├▄ø╝■Ą─╣”─▄Ż¼ĮY║Žæ¬ė├│╠ą“╠ß╣®Ą─Č■┤╬ķ_░lĮė┐┌▀Mąąķ_░lŻ¼┐╔ęįČ©ųŲĘ¹║Ž╩╣ė├ąĶŪ¾Ą─▒ŃĮ▌╣”─▄Ż¼▀Ć┐╔ęįīóĮyėŗ▀^│╠┐žųŲSPCöĄō■Ęų╬÷╝╝ągĮY║Ž▀MüĒŻ¼▓óėą└¹ė┌╔·«aą¦┬╩Ą─╠ß╔²ĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://m.vmgcyvh.cn/
▒Š╬─ś╦Ņ}Ż║CATIA─Żą═ųą£y┴┐öĄō■Ą─╠ß╚Ī╝╝ąg
▒Š╬─ŠWųĘŻ║http://m.vmgcyvh.cn/html/solutions/14019315436.html